
Este artículo fue concebido como un curso típico, algo así como: “Todo lo que necesita saber sobre la tracción de cuatro ruedas, pero no sabía a quién preguntar”. En qué se diferencia el accionamiento diferencial del conectado con la ayuda de visco-acopladores o unidades tipo Haldex, para qué sirven los diferenciales de auto-bloqueo… Pero cuanto más estudiamos el aspecto histórico del problema, más sorprendidos nos quedamos. Resultó que el primer automóvil de pasajeros con tracción permanente se fabricó en Holanda hace cien años. Y en 1935, por ejemplo, un automóvil de carreras estadounidense con tracción total casi salvó a la humanidad de la Segunda Guerra Mundial.
¿Por qué un automóvil de pasajeros necesita tracción total? Ahora, en el siglo XXI, esta pregunta parece retórica. Por supuesto, para el mejor funcionamiento de las fuerzas de tracción de un motor y para que las ruedas funcionen lo menos posible al acelerar en una superficie resbaladiza. ¡Cuatro ruedas motrices son mejores que dos! Pero la humanidad ha comprendido durante mucho tiempo esta verdad básica. Pregúntele a cualquier experto en automóviles y le dirá que la era de la tracción total en los automóviles de pasajeros masivos comenzó solo en 1980 con la aparición del Audi Quattro. También nombrará predecesores raros, por ejemplo, el superdeportivo inglés Jensen FF de 1966 y el Subaru Leone 4WD de 1972. Sin embargo, un verdadero experto hará una reserva de inmediato: los primeros autos Subaru con tracción en las cuatro ruedas no tenían una tracción total permanente, era a tiempo parcial. Y esto, como dicen, es como comparar manzanas y naranjas.
Solución de emergencia
La conducción con tracción en uno de los pares de ruedas es una solución paliativa para los autos de pasajero. El nombre Part-Time 4WD proviene del mundo de los SUV y las camionetas todoterreno. Un automóvil de este tipo, en el que uno de los ejes conduce constantemente y el otro está conectado rígidamente si es necesario, puede mostrar sus características de tracción total solo fuera de la carretera. La tracción integral sólida debe apagarse cuando se conduce sobre pavimento duro. ¿Por qué? La razón es la llamada circulación de energía. Después de todo, al girar, las ruedas delanteras cubren una distancia más larga, moviéndose a lo largo de arcos de un radio mayor, lo que significa que giran más rápido que las traseras. Y en los automóviles con este tipo de conducción, la tracción en las ruedas delanteras se deteriora y en las traseras, por el contrario, aumenta. En algunos casos, la tracción puede ser reemplazada por frenado, es decir, las ruedas delanteras aumentarán la resistencia al movimiento del automóvil. Está bien cuando hay suciedad o nieve debajo de las ruedas, a menos que el automóvil se vuelva más difícil de conducir y se mueva hacia afuera como un “arado” con las ruedas giradas. Al moverse en una curva, todas las ruedas giran a lo largo de sus trayectorias y se ven obligadas a girar a diferentes velocidades angulares. Por lo tanto, son necesarios tres diferenciales para la tracción total permanente: dos entre ruedas y uno entre ejes.
Aunque se utilizó una tracción total bloqueada en los automóviles de carretera de pasajeros, eran más como coches de campo traviesa. Por ejemplo, en la URSS, en 1938, comenzó la producción de pequeños lotes del GAZ-61, el “Emka” de tracción en las cuatro ruedas con un motor de seis cilindros y un eje delantero de medio tiempo. Después de la guerra, también se produjo una versión “todoterreno” del “Pobeda”, el GAZ-M72 y el Moskvitch-410 con una transmisión similar… Y el Subaru Leone 4WD de 1972, por cierto, fue también hecho para superar el todoterreno: el espacio libre de los automóviles con un eje trasero de tiempo parcial era mayor que el de los Subarus convencionales con tracción delantera.
El Subaru Leone 4WD Station Wagon (1972-1979) es una versión de tracción en las cuatro ruedas del automóvil de tracción delantera con tracción trasera conectada manualmente. El motor tiene una capacidad de 1,4 litros (72 CV) o 1,6 litros (80 CV). Además de la camioneta, también se equiparon un sedán y una camioneta con tracción total. Hasta 1989, la tracción trasera se conectaba manualmente (en automóviles con transmisión manual) o automáticamente, con un embrague de fricción de discos múltiples (en automóviles con transmisión automática) en todos los Subarus con tracción en las cuatro ruedas.
Por lo tanto, conducir en este modo es inútil en carreteras pavimentadas donde los automóviles pasan la mayor parte del tiempo; solo hace que un automóvil sea más pesado. Después de todo, durante este tiempo el automóvil tiene que “llevar” una caja de transferencia con él, en la que se da una toma de fuerza para el segundo eje “adelantado temporalmente”, un eje de transmisión más, el engranaje principal del segundo eje…
Mientras tanto, es muy fácil convertir la tracción total a tiempo parcial en 4WD a tiempo completo. Solo es necesario agregar un diferencial entre ejes a la caja de transferencia.
Tracción a las cuatro ruedas permanente
¿Por qué necesitamos un diferencial entre ejes? Dos diferenciales entre ruedas, delantero y trasero, permiten que cada par de ruedas rote a diferentes velocidades en los giros. Y el eje entre ejes hace este trabajo para ambos. Por lo tanto, un automóvil con tres diferenciales puede moverse fácilmente con tracción total permanente en cualquier camino.
¿Elemental? Mientras tanto, hasta principios de los 80, se creía que la tracción en las cuatro ruedas a tiempo completo no era necesaria para los autos de carretera. Dijeron, ¿por qué el motor debería girar constantemente el segundo par de ruedas y las partes de transmisión relacionadas con el asfalto seco? Esto es tanto ruidoso como costoso en cuanto al consumo de combustible… Y solo después de la aparición del Audi Quattro, la opinión pública comenzó a cambiar hacia la tracción en las cuatro ruedas a tiempo total. Después de todo, el empuje del motor se distribuye constantemente no en dos, sino en las cuatro ruedas, dejando un mayor margen de agarre para el reflejo de las fuerzas laterales. Tal automóvil resulta ser mucho más estable en una curva al acelerar o frenar con un motor.
Pasemos a la conducción del Audi 80 Quattro de la segunda mitad de los años ochenta. El esquema Quattro es más simple y compacto que la transmisión Ferguson. Audi utiliza el diferencial de auto-bloqueo Torsen desde 1984. Al contrario del diferencial que está bloqueado por un visco-acoplador, Torsen reacciona a los cambios en el par implementados por las ruedas de cada uno de los ejes, aumenta la estabilidad durante la frenada y permite utilizar frenos ABS, ya que se bloquea solo con tracción.
Por cierto, se considera que el Range Rover (1970) y el ruso Niva (1976) son los primeros automóviles producidos en serie con diferenciales entre ejes en la transmisión. Pero dado que estos dos coches todavía pertenecen a la tribu todoterreno, el Audi Quattro cosecha los laureles de ser pionero entre los autos particulares.
¿Y qué pasa con los diseñadores de autos de carreras? ¿No habían usado antes la tracción total a tiempo completo? Sabemos que los intentos de hacer autos de carreras con tracción en las cuatro ruedas se hicieron antes de la era Quattro. Por ejemplo, el primer proyecto de la posguerra de Ferdinand Porsche fue un automóvil de carreras con tracción en las cuatro ruedas, el Cisitalia 360, con un diseño de motor central y un motor de 12 cilindros y 1.5 litros. Pero se sabe con certeza que la tracción delantera de esta maravilla tecnológica era a tiempo parcial: el corredor tenía que usarla solo en secciones rectas de la pista y volver a cambiar a la tracción trasera antes de girar.
¿El Cisitalia tuvo predecesores? Resultó, por ejemplo, que el mismo Ferdinand Porsche construyó un automóvil eléctrico con cuatro ruedas motrices en 1900. Pero un automóvil de carreras de 1902 de la compañía holandesa Spyker causaría una verdadera conmoción entre los expertos en automóviles. En aquellos tiempos “antiguos”, cuando incluso los frenos se hacían solo en las ruedas traseras, este automóvil tenía literalmente tracción total permanente, ¡con un diferencial entre ejes!
Spyker, una empresa holandesa para la producción de carruajes tirados por caballos, fue fundada en 1880 por los hermanos Spyker (en flamenco, el apellido se escribe Spijker). En 1900, los hermanos lanzaron el primer automóvil de su propio diseño, y dos años más tarde, con la ayuda del diseñador belga Joseph Laviolette, se desarrolló el Spyker 4WD (1902-1907) de carreras con tracción en las cuatro ruedas con un diseño sorprendentemente progresivo: ¡con tres diferenciales! También había tres mecanismos de frenado: dos actuaban en las ruedas traseras y se instaló otro freno en el eje de transmisión de las ruedas delanteras.

Así que podemos decir con seguridad que el esquema 4WD de tiempo completo tiene más de cien años… No se produjeron muchos Spykers con tracción en las cuatro ruedas; costaban mucho dinero y no pudieron lograr el éxito en las carreras por varias razones. Otros autos de carreras con tracción en las cuatro ruedas, el Bugatti Tipo 53 y el Miller FWD de principios de los años 30, tampoco tuvieron mucho éxito. En cuanto a Bugatti, la iniciativa perteneció al ingeniero de Fiat Antonio Pichetto, quien en 1930 propuso a Ettore Bugatti construir un auto de carreras con una configuración de ruedas 4×4. Y en 1932, se fabricaron tres Bugatti Tipo 53 con tracción total, con potentes motores de inyección de aire de 300 caballos de fuerza, con tracción total permanente y con tres diferenciales.
La transmisión con tres diferenciales distribuye el empuje de un motor de ocho cilindros con inyección de aire de 300 caballos de fuerza a las cuatro ruedas. La caja de cambios, como es habitual en Bugatti, se instaló por separado del motor, la caja de transferencia con el diferencial entre ejes formaba una unidad con ella. Los ejes de transmisión para los ejes delantero y trasero estaban en el lado izquierdo del automóvil, por lo que los corredores se sentaban a la derecha. A pesar de las recomendaciones del diseñador de automóviles con tracción delantera de esa época, Albert Gregoire, no se utilizaron juntas de velocidad angular iguales del tipo Tracta, pero se utilizaron juntas cardán ordinarias en la tracción de las ruedas delanteras del Bugatti T53. Además, tuvieron que usar una suspensión delantera independiente atípica de Bugatti en un resorte transversal en el Tipo 53. Todo esto condujo a un aumento de las cargas en el volante: era extremadamente difícil conducir el automóvil en las curvas, aunque las velocidades de los giros en la grava eran más altos que la de los autos con tracción trasera de esa época. Se construyeron un total de tres Bugatti T53, que compitieron en diferentes carreras hasta 1935.
Curiosamente, los italianos estudiaron cuidadosamente los autos de carreras estadounidenses de tracción delantera que Miller compró específicamente para el desmontaje antes de crear el Bugatti de tracción total. A su vez, el estadounidense Harry Miller se interesó por la idea de Bugatti y también decidió construir una versión de tracción total de su automóvil, habiendo conseguido el patrocinio de la empresa FWD (Four Wheel Drive) que producía camiones de configuración 4×4. Así es como aparecieron los autos de carreras con tracción en las cuatro ruedas Miller FWD.
El diseñador estadounidense Harry Miller se hizo famoso en los años 20-30 por sus autos de carreras para competencias de 500 millas en el Indianapolis Motor Speedway, y sus motores rectos de ocho cilindros con dos árboles de levas en cabeza eran la base de los motores de Ettore Bugatti. Curiosamente, Miller construyó autos con tracción delantera y trasera, y en 1932, fabricó varios chasis Miller FWD con tracción en las cuatro ruedas con tres diferenciales en la transmisión. Uno de los Millers con tracción en las cuatro ruedas lideró la carrera Indy 500 de 1934, pero terminó noveno debido a problemas técnicos.
Es con estos autos que se desarrolla un episodio curioso: durante la carrera en la pista de Avus en Berlín en 1935, el Miller con tracción en las cuatro ruedas iba tercero cuando su motor de ocho en línea no pudo soportarlo y literalmente explotó. Al mismo tiempo, las piezas del motor casi llegaron a las gradas, en las que, entre otras personas importantes del Partido Nacionalsocialista, ¡estaba sentado el propio Hitler! Si un fragmento de un pistón hubiera golpeado la cabeza de una persona, el curso de la historia mundial habría sido completamente diferente…
Pero el Bugatti T53 y el Miller FWD no recibieron una evaluación adecuada: el diseño “crudo” y las averías constantes fallaron. Pero el siguiente episodio en la historia de los automóviles de pasajeros con tracción total permanente resultó ser verdaderamente fatídico.
Fórmula de Ferguson
Volvamos a la teoría para evaluar la importancia de lo que estaba sucediendo en Inglaterra a principios de los 50-60. El diferencial entre ejes está diseñado para “desatar” ambos ejes impulsores. Por ejemplo, las ruedas traseras patinan locamente y las delanteras están paradas. ¡Y el diferencial no evita esto de ninguna manera!
La “cura para esta dolencia” fue inventada por primera vez por los diseñadores de SUV: este es un bloqueo positivo. El conductor tira de la palanca en el momento adecuado, el mecanismo fija firmemente los engranajes del diferencial entre ejes y la transmisión pasa del diferencial, “libre”, a rígidamente cerrado. Fue de acuerdo con este esquema que se fabricaron las primeras generaciones de Range Rover, la Niva rusa y muchos otros SUV. Y, por cierto, también en el primer Audi Quattro: hasta 1984, el conductor tenía que activar el bloqueo del diferencial entre ejes por sí mismo.
Nuevamente, esta solución es paliativa: el bloqueo en un automóvil de carretera solo se puede activar fuera de la carretera. Debes apagarlo en el asfalto. Y si un automóvil se sube repentinamente a un tramo resbaladizo de la carretera, las ruedas de un eje comenzarán a patinar antes que las otras al aplicar tracción.
¿Es posible hacer que el bloqueo diferencial se active automáticamente al deslizar? La introducción de un diferencial entre ejes con auto-bloqueo está asociada con el nombre del inglés Tony Rolt, corredor y diseñador. Él y su amigo Fred Dixon, también corredor y un verdadero amante de jugar con el hardware de los automóviles, incluso antes de la guerra abrieron su propia oficina de Desarrollos Rolt/Dixon para la preparación de autos de carreras. Después de la guerra, los dos amigos se interesaron por la idea de la tracción total a tiempo completo. Después de haber construido un “carro” experimental de tracción en las cuatro ruedas llamado “Crab”, en 1950, Rolt y Dixon quedaron bajo el ala de Harry Ferguson, un exitoso fabricante de tractores. Así nació la firma Harry Ferguson Research.
Ferguson no estaba interesado en los coches de carreras, pero soñaba con un coche de carretera seguro, cuyas ruedas no patinaran durante la aceleración y no se bloquearan al frenar. Rolt y Dixon decidieron diseñar un automóvil de este tipo desde cero, ¡completamente, incluida la carrocería, la transmisión y la unidad de potencia!
Los amigos no tenían suficiente conocimiento, y Claude Hill fue invitado al puesto de diseñador jefe, quien dejó Aston Martin por un trabajo tan interesante. A pesar de las finanzas de Ferguson, el trabajo fue lento: el sedán experimental Ferguson R4 estuvo listo solo después de seis años. Pero qué coche se hizo: tracción total, con un motor plano de cuatro cilindros, con frenos de disco en todas las ruedas y el sistema de frenos antibloqueo electromecánico Dunlop MaxaRet tomado de la aviación.
El Ferguson R4 (1956) era un automóvil experimental con la transmisión Ferguson Formula. El prototipo tenía un convertidor de par en lugar de una caja de cambios.

Pero lo más interesante para nosotros se encontraba dentro de la caja de transferencia del prototipo. Una vez desmontado, habríamos visto un “juego” adicional de engranajes, dos embragues de bola y dos paquetes de acoplamientos de fricción, además del diferencial. Mientras las ruedas no patinaran, todo estaba en ralentí silencioso. Pero cuando las ruedas de uno de los ejes comenzaron a patinar y la diferencia en las velocidades de rotación de los ejes de salida alcanzó un cierto valor, uno de los embragues se activaba, apretaba “su” paquete de acoplamientos de fricción y frenaba los engranajes diferenciales, ¡Bloqueándolo instantáneamente y convirtiendo la transmisión diferencial en una muy sólida y segura!
El siguiente prototipo, el Ferguson R5 de 1962, que nuevamente tardó seis años en prepararse, resultó ser aún más interesante: era una camioneta con tracción en las cuatro ruedas. Los expertos de la revista Autocar, que más tarde probaron el Ferguson R5, compartieron sus impresiones: “¡El automóvil alcanza el límite de deslizamiento a velocidades increíblemente altas!”
El Ferguson R5 se preparó para la producción en masa en 1962.
Pero ninguno de los fabricantes de automóviles había emprendido la producción de la primera camioneta familiar con tracción en las cuatro ruedas del mundo con un diferencial de auto-bloqueo entre ejes y ABS: el Ferguson de serie habría resultado ser demasiado complicado y caro. Sin embargo, en 1962, Rolt aún logró interesar a la gerencia de la compañía Jensen: propuso adaptar una transmisión de tracción total para el cupé Jensen CV8 con un motor Chrysler V8 de 300 hp, que luego se estaba preparando para la producción en masa. ¡La tracción en las cuatro ruedas resultó ser muy útil para el cupé potente y de alta velocidad!
Tres años más tarde, se construyó el Jensen CV8 FF con tracción en las cuatro ruedas experimental. Y en 1966 apareció el siguiente modelo: el Jensen Interceptor, con un motor de ocho cilindros de 325 caballos de fuerza aún más potente. Además del cupé de tracción trasera, también se ofreció una opción con una modesta placa de identificación JFF. Era el famoso Jensen FF: ¡el primer automóvil de producción con tracción total del mundo con diferencial entre ejes con auto-bloqueo y ABS! Las letras FF son Formula Ferguson, la designación de la transmisión patentada por Rolt y sus colegas.

Todos los periodistas de automoción de esa época mencionaron la extraordinaria estabilidad de los Jensens con tracción en las cuatro ruedas y “un margen de empuje casi ilimitado sobre asfalto mojado”. Es una pena que el propio Ferguson ya no estuviera vivo en ese momento; murió en 1960…
¿Por qué estamos hablando tanto de la Fórmula Ferguson? ¡Porque fue Harry Ferguson Research quien, por primera vez en el mundo, prestó tanta atención a la tracción total como medio para aumentar la seguridad activa!
Ya hemos dicho que la tracción en las cuatro ruedas deja un mayor margen de agarre para la reflexión de las fuerzas laterales. Y esto es una ventaja. Pero también hay un inconveniente: se pierde la falta de ambigüedad de las reacciones al suministro de combustible. Si aprieta el acelerador en un automóvil potente con tracción trasera en un giro resbaladizo, esto hará que el eje trasero patine. En un automóvil con tracción delantera, por el contrario, las ruedas delanteras patinarán cuando se aplique la tracción. Si es bueno o malo no es el punto. Lo principal es que el conductor siempre sabe cómo se comportará el automóvil en este caso.
¿Y qué eje se deslizará en un automóvil con tracción en las cuatro ruedas? Esta pregunta no es fácil de responder. Si la carrocería delantera está actualmente más descargada o hay una superficie más resbaladiza debajo de las ruedas delanteras, comenzará la deriva. Y si las ruedas traseras tienen las peores condiciones de agarre, el auto patinará. ¡La reacción puede ser ambigua! Y esto no es seguro.
El Jensen FF (1966-1971) es una versión con tracción en las cuatro ruedas del cupé Jensen Interceptor. El primer automóvil de producción con tracción en las cuatro ruedas con diferencial entre ejes y auto-bloqueo. El motor Chrysler V8 con un bloque grande que tiene una capacidad de 6.3 litros desarrolló 325 caballos de fuerza y condujo todas las ruedas a través de la caja de cambios automática TorqueFlite de tres velocidades o una transmisión manual de 4 velocidades. En neumáticos diagonales con una dimensión de 6,70-15 (como el Volga GAZ-21), el Jensen FF con un peso en vacío de 1800 kg desarrolló 212 km/h y alcanzó los 100 km/h en 7,7 segundos. Otras características técnicas son: elmecanismo de dirección de piñón y cremallera con dirección asistida, frenos de disco en todas las ruedas, el ABS monocanal Dunlop MaxaRet (retardo máximo), suspensión delantera independiente sobre doble horquilla y muelle dependiente con barra Panhard en la parte trasera. En 1968, en el Reino Unido, el Jensen FF costaba 6000 libras, casi lo mismo que el Rolls-Royce más barato. Se produjeron un total de 318 coches con tracción en las cuatro ruedas.
Afortunadamente, Tony Rolt era un piloto de carreras, y uno muy bueno: una vez, a principios de los 50, incluso ganó la carrera de las 24 Horas de Le Mans. Por lo tanto, Rolt y sus colegas trataron de evitar la ambigüedad de la tracción total desde el principio utilizando un diferencial entre ejes no igualador. El 63% del par se aplicó a las ruedas traseras de todos los automóviles con transmisión Ferguson, el 37% a las delanteras. Por lo tanto, la reacción al aumento de la tracción fue cercana a la tracción trasera.
El diferencial de auto-bloqueo permitió al Jensen sacar lo mejor de ambos tipos de transmisión. La fácil entrada en la curva y la ausencia de circulación de potencia en los modos de conducción normales sin deslizamientos se deben a la conducción diferencial. Y la mejor realización del empuje del motor al resbalar es desde el sólido.
Pero los embragues de adelantamiento del mecanismo de bloqueo funcionaron rígidamente, en un modo pulsado, convirtiendo instantáneamente una transmisión diferencial asimétrica en una bloqueada y viceversa. Por lo tanto, ¡la ambigüedad aumentaba al resbalar! Era necesario un mecanismo que cambiara de manera más flexible y suave el grado de bloqueo del diferencial entre ejes. Y a finales de los 60, Tony Rolt con Derek Gardner, quien más tarde fue el diseñador jefe de los autos de carrera Tyrrell, se involucraron en extraños, a primera vista, experimentos con silicona líquida que se usaba en acoplamientos de transmisión de ventiladores de radiador. Sí, fueron Rolt y Gardner quienes entraron en la historia como los inventores del visco-acoplador.
Se están desarrollando diferenciales con auto-bloqueo
Un cilindro con paquetes de acoplamientos de fricción en el interior, llenos de silicona líquida, era perfectamente adecuado para el propósito previsto por Rolt: frenar los engranajes del diferencial entre ejes cuando las ruedas patinan. Si bien las velocidades de rotación de todas las ruedas son aproximadamente iguales, el “viskodrive” no interfiere de ninguna manera con el funcionamiento del diferencial entre ejes. Pero ahora las ruedas de uno de los ejes resbalan. Los engranajes del diferencial entre ejes comienzan a girar inmediatamente, los paquetes visco-acopladores de fricción conectados con él “levantan” el líquido de silicona y el embrague “agarra”, bloqueando parcial o completamente el diferencial entre ejes.
Tal dispositivo bloqueó el diferencial de manera más suave y tranquilamente, lo que tuvo un efecto positivo en el manejo. Después de obtener las patentes de un visco-acoplador, Tony Rolt formó la empresa FF Developments en 1971, específicamente para equipar automóviles con transmisiones de tracción en las cuatro ruedas de su propio diseño. Por ejemplo, las versiones con tracción en las cuatro ruedas de las camionetas Bedford para los departamentos forestales británicos, un lote de autos Ford Zephyr FF para la policía o los sedanes Opel Senator 4×4 para la misión militar británica en Berlín fueron algunos de los primeros pedidos de la compañía. Pero la transmisión del automóvil estadounidense AMC Eagle, que se fabricó entre 1979 y 1988, fue el logro más importante de FFD. Era el automóvil de pasajeros AMC Concord ordinario, pero con una carrocería elevada de 75 mm y neumáticos “todoterreno” agrandados. Y, por supuesto, con una transmisión de tracción total. Además, el coche de serie estaba equipado por primera vez en el mundo con un diferencial entre ejes bloqueado por un visco-acoplador.
Por supuesto, el AMC Eagle fue creado principalmente para aquellos que periódicamente asaltan el todoterreno: la tracción total apareció en estos autos no por el deseo de lograr una aceleración más sólida o una mejor estabilidad y manejo, como en el caso del Jensen FF. o el superdeportivo Audi Quattro. Pero desde el punto de vista de la transmisión, coches de conducción como el Subaru Impreza Turbo o el Mitsubishi Lancer Evo de la primera a la sexta generación se convirtieron en herederos directos del AMC Eagle. Sus diferenciales entre ejes también están bloqueados por visco-acopladores incorporados.

El visco-acoplador de la caja de transferencia del AMC Eagle es un cuerpo cilíndrico con discos de fricción, lleno de un líquido de “organosilicio” viscoso (siloxano), integrado en el diferencial entre ejes. Cuando las ruedas de uno de los ejes se deslizan, los paquetes de discos principales y propulsados en el visco-acoplador giran entre sí, la presión y la temperatura en el interior aumentan, la viscosidad del siloxano cambia y el visco-acoplador frena uno de los engranajes de salida, evitando que gire con respecto a la carrocería y bloqueando el diferencial entre ejes.
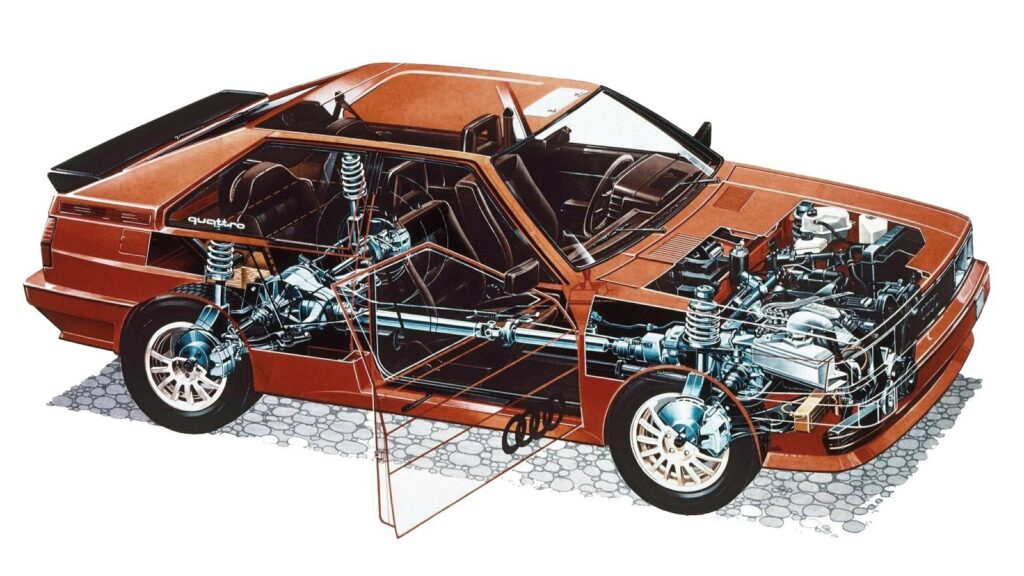
El coupé de serie Audi Quattro, que apareció en 1981, dos años después del debut del AMC Eagle, estaba equipado con un diferencial entre ejes abierto convencional con bloqueo positivo. Sin embargo, Ferdinand Piech, que era el jefe del departamento de ingeniería de Audi a principios de los 80, eligió un esquema muy elegante para el Quattro, que se adaptaba perfectamente al diseño de los automóviles de Ingolstadt. La unidad de potencia ubicada longitudinalmente del automóvil con tracción delantera apuntaba directamente a las ruedas traseras con la cara final de la caja de cambios; solo quedaba integrar un diferencial entre ejes en la caja de transmisión. Pero los diseñadores de Piech no construyeron un esquema tradicional para autos con tracción en las cuatro ruedas con una caja de transferencia separada para la tracción delantera. Los alemanes hicieron hueco el eje secundario de la caja, y el eje de transmisión de las ruedas delanteras pasó a través de él. Verdaderamente, la simplicidad del genio…
Desde el principio, los ingenieros eligieron para Audi, a diferencia del FFD, una distribución simétrica del par a lo largo de los ejes – 50:50. Y en 1984, las manijas arcaicas de bloqueo positivo del “centro” finalmente desaparecieron de las cabinas de los autos Audi con tracción total: el diferencial Torsen de bloqueo automático, que nos resulta familiar, apareció en las transmisiones Quattro. El nombre Torsen proviene de las palabras “detección de par” y refleja la capacidad de este dispositivo puramente mecánico para aumentar instantánea y suavemente el grado de bloqueo en respuesta a cambios de par en los ejes de salida. Por lo tanto, Torsen no necesita un visco-acoplador, se bloquea a sí mismo. Además, no se activa por la diferencia en las velocidades de rotación después del inicio del deslizamiento, sino incluso antes: ¡Torsen es capaz de responder a los cambios en las condiciones de agarre en la zona de contacto del neumático!
Por cierto, cuando los diseñadores de SUV grandes recientemente comenzaron a pensar en lograr un manejo de “automóvil de pasajeros”, también recordaron acerca de Torsen: se usa en transmisiones de automóviles como el Range Rover, el VW Touareg/Porsche Cayenne y el Toyota Land Cruiser Prado.
Pero volvamos a los 80. La entrada triunfal del Audi Quattro en la etapa de rally fue el comienzo de un boom de tracción total: todos los equipos de rally del Grupo B se apresuraron a crear versiones 4×4. Uno tras otro, aparecieron el Peugeot 205 T16, el Metro 6R4, el Lancia Delta S4, el Ford RS200. Todo como uno: con visco-acopladores en diferenciales con auto-bloqueo desarrollados por FFD. Stuart Rolt, el hijo de Tony, fue responsable de trabajar con equipos de rally en FFD…
A principios de los 90, la planta de AZLK también recurrió a FFD cuando se decidió diseñar una modificación de rally con tracción total del Moskvitch-2141. Con la ayuda de los británicos, se creó una transmisión con tres diferenciales de auto-bloqueo, delantero, trasero y entre ejes (exactamente como en los autos de carrera Ford RS200). La maniobrabilidad de los Moskvitch experimentales con tracción en las cuatro ruedas en modos extremos merecía las evaluaciones más halagadoras: el comportamiento de los autos en el deslizamiento era predecible y conveniente para los corredores. Resultó que es posible ajustar el manejo del automóvil en una amplia gama seleccionando la “rigidez” de los visco-acopladores de bloqueo en los tres diferenciales. Por ejemplo, un bloqueo más “estricto” del diferencial trasero entre ruedas aumenta la tendencia de un automóvil a patinar el eje trasero. Un aumento en el coeficiente de bloqueo del diferencial delantero o entre ejes, por el contrario, aumenta el margen de estabilidad: un automóvil está menos dispuesto a conducir en una curva debido al deslizamiento y sub-viraje de las ruedas delanteras.
Sin embargo, este ajuste es relevante solo en un caso: con un estilo de conducción de rally con toboganes. Por lo tanto, tres diferenciales de auto-bloqueo son prerrogativa de los coches de rally del grupo WRC. Además, por regla general, no se incorporan visco-acopladores en los diferenciales de estos automóviles, sino paquetes de embragues multidisco con accionamiento hidráulico y con control electrónico. De esta manera, los diseñadores obtienen las mayores oportunidades para configurar la dirección en tiempo real. Por ejemplo, la computadora a bordo puede “disolver” los embragues en los tres diferenciales al entrar en una curva, convirtiéndolos en abiertos, de modo que el automóvil pueda girar más fácilmente. Y cuando el conductor empiece a acelerar al entrar en línea recta, la electrónica dará el mando, y “sujetará” los embragues en los diferenciales de tal forma que se consiga un mínimo deslizamiento de todas las ruedas y, al mismo tiempo no se cruce la línea de sub-viraje aceptable, más allá de la cual el automóvil se desviará de la curva.
Por cierto, los primeros embragues controlados se utilizaron en Daimler-Benz, en la transmisión del Mercedes-Benz E-Class 4Matic de 1986 con la carrocería W124. Además, había tres embragues: si era necesario, la electrónica primero conectaba la transmisión a las ruedas delanteras y luego activaba secuencialmente el bloqueo de los diferenciales entre ejes y ruedas traseras. Pero tal transmisión resultó ser irracionalmente complicada. Además, la electrónica conectaba y desconectaba alternativamente las ruedas delanteras en una superficie inestable…
La empresa Porsche fue otra pionera en el uso de embragues controlados electrónicamente en coches de alta velocidad: había dos embragues en el Porsche 959 de 1986 y la electrónica funcionaba en cuatro modos que un conductor puede elegir. Más tarde, los japoneses comenzaron a fabricar automóviles de producción con transmisiones de complejidad similar; este es, por ejemplo, el Mitsubishi Lancer Evo, el automóvil de carretera con tracción total más avanzado de todos los que haya probado la popular revista rusa Autoreview. La evolución con el diferencial ACD (Active Central Differential) controlado entre ejes y el diferencial AYC (Active Yaw Control) trasero con distribución activa de par puede hacer maravillas…

En lugar de un diferencial
Mientras que los ingenieros de rally piensan en los mecanismos de auto-bloqueo, los diseñadores de automóviles de pasajeros masivos, por el contrario, tomaron la línea de la simplificación: abandonaron el diferencial entre ejes y lo reemplazaron con un visco-acoplador. El Volkswagen Golf II Syncro de 1985 se convirtió en el primer automóvil de pasajeros europeo con dicha transmisión; su transmisión fue desarrollada por ingenieros de GKN, que adquirió el FFD en 1969. La simplicidad y la unificación del modelo de tracción total con el básico fueron las ventajas de tal esquema. En condiciones normales, el automóvil conservaba las características y la capacidad de control del de tracción delantera, y cuando las ruedas delanteras patinaban, el visco-acoplador se activaba después de 0,2 segundos, capaz de distribuir hasta el 70% del par en la parte trasera.
Prestemos atención a la transmisión del VW Golf III Syncro. La caja de transferencia está unida a la caja de cambios y el visco-acoplador está instalado en el bloque con la transmisión principal del eje trasero y conecta la transmisión a las ruedas traseras cuando las ruedas delanteras patinan. En VW Golf IV, el acoplador Haldex reemplazó al visco-acoplador.
Pero una conducción tan “simplificada” de las ruedas traseras tenía un inconveniente importante: incluso un ligero retraso en el funcionamiento del visco-acoplador agravaba la ambigüedad de las reacciones. Cuando se suministró gasolina en un giro resbaladizo, el automóvil primero se desvió hacia afuera como uno de tracción delantera y luego, con la conexión de las ruedas traseras, cambió drásticamente su comportamiento de conducción y podría patinar.
Los japoneses se distinguieron aquí: intentaron repetidamente suavizar este inconveniente seleccionando las características de los visco-acopladores y usándolos no solo para encender la tracción en las ruedas traseras, sino también para bloquear los diferenciales entre ruedas. Había hasta tres visco-acopladores en algunos modelos (por ejemplo, el Nissan Sunny/Pulsar de 1988): uno incluía tracción trasera y los otros dos servían para bloquear los diferenciales entre ruedas. En el Mazda Concerto 4WD, los visco-acopladores reemplazaron no solo el eje intermedio, sino también el diferencial trasero entre ruedas…
Pero luego resultó que es mucho más conveniente usar solo un embrague de fricción, cuyos paquetes se comprimen mediante un accionamiento hidráulico, en lugar de un visco-acoplador en la tracción trasera. Y la electrónica puede controlar perfectamente la compresión de los embragues de fricción y, por lo tanto, ajustar el valor del par aplicado a las ruedas traseras.
Hoy en día, la mayoría de los vehículos todoterreno y SUV de pasajeros tienen un embrague controlado en la transmisión de uno de los ejes, ya sea Haldex en los autos con plataforma VW Golf, el sistema VTM-4 de Honda o xDrive en los BMW. Además, la rápida velocidad de funcionamiento de los embragues modernos ha hecho que la demora en la conexión de las ruedas sea casi imperceptible; ahora todo depende solo de cómo esté configurada la electrónica de control. Por ejemplo, las transmisiones del Golf 4Motion y del Audi A3 Quattro son completamente idénticas en diseño. Pero un software diferente permite a los diseñadores de Volkswagen elegir una distribución simétrica de torque entre los ejes, y los ingenieros de Audi prefieren distribuir solo el 40% del empuje hacia la parte trasera, dando a sus autos un carácter más de tracción delantera. Es cuestión de gustos…
¿Y qué esquemas prefieren los conductores? Afortunadamente, los coches de carretera de pasajeros con transmisión conectada manualmente al segundo eje ahora no se fabrican. Y en cuanto a los otros tres esquemas…
Por supuesto, desde nuestro punto de vista, los coches más interesantes son los herederos de la Fórmula Ferguson, en cuyas transmisiones hay un diferencial entre ejes con auto-bloqueo. Y no importa de qué forma se realice el bloqueo: mediante un visco-acoplador, como en Subarus, mediante el diferencial mecánico Torsen, como en el Audi A4-A6-A8 Quattro, el VW Phaeton o mediante embragues controlados electrónicamente como en el Mitsubishi Lancer Evo. Lo principal es que el “centro” de bloqueo automático con la configuración adecuada puede mejorar significativamente el manejo del automóvil, hacerlo más seguro y agradable para un conductor sofisticado.
La principal tendencia hoy en día es un vector de empuje variable, cuando el par se aplica de manera preventiva a la orden de la electrónica a la rueda, que es capaz de implementarlo de la manera más eficiente posible. Por el momento, el sedán Mitsubishi Lancer Evo X tiene la transmisión de tracción total más compleja del mundo. Los engranajes adicionales pueden transferir el par entre las ruedas traseras, el centro está bloqueado por un embrague controlado electrónicamente y hay un dispositivo de auto-bloqueo mecánico convencional en la parte delantera. La era de la tracción total tal como la conocemos terminará con la aparición de un automóvil eléctrico con cuatro ruedas motrices.
Pero tampoco descartamos los automóviles con tracción trasera a tiempo parcial; cada vez hay más. Volvo y Saab han utilizado activamente el acoplamiento Haldex recientemente. Las transmisiones con diferenciales abiertos entre ejes también encuentran su aplicación, en vehículos de alta velocidad como el Mercedes 4Matic de todas las clases. Pero en estos automóviles, junto con el diferencial de tracción en las cuatro ruedas, funciona necesariamente la electrónica antideslizante permanente, lo que hasta cierto punto compensa la falta de un mecanismo de auto-bloqueo.
El embrague multidisco Haldex se activa por el menor desajuste de las velocidades de rotación del eje. La rotación de cualquiera de las levas frontales hace que los rodillos comiencen a rodar sobre las superficies de trabajo y se muevan hacia adelante y hacia atrás, empujando los pistones en los cilindros de anillo de la bomba. Los pistones bombean aceite al cilindro esclavo con un pistón que comprime el paquete de discos. Pero la electrónica, con la ayuda de una válvula solenoide, puede liberar la presión, ajustando así de manera flexible el valor del par de torsión suministrado a las ruedas.

Sin embargo, recientemente hemos notado que las características reales de conducción de los automóviles con diferentes transmisiones de tracción en las cuatro ruedas se están acercando entre sí, por supuesto, cuando se conduce en vías públicas y no en pistas de rally. Y cuanto más avanzados sean los sistemas electrónicos antideslizantes y los programas de control del embrague del tipo Haldex, menos diferirá la maniobrabilidad de los automóviles equipados con ellos. Obviamente, esto es un progreso.
Esta es una traducción. Puede leer el original aquí: https://www.drive.ru/technic/4efb336400f11713001e4f54.html

Publicado Noviembre 04, 2021 • 29m para leer



