
Dieser Artikel wurde für Bildungszwecke erstellt. Wenn Sie alles über Allradantrieb wissen möchten, bleiben Sie dran. Wir erzählen Ihnen, wie sich der Differentialantrieb von dem mit einer zähflüssigen Kupplung oder Haldex-Aggregaten verbindet und wofür die selbstsichernden Differentiale verwendet werden… Aber je tiefer wir in die Geschichte eingetaucht sind, desto größer war die Überraschung. Wie sich herausstellte, erschien das erste Personenfahrzeug mit permanentem Allradantrieb vor 100 Jahren in Holland! Und in 1935 rettete der amerikanische Rennwagen fast die menschliche Rasse vor dem Zweiten Weltkrieg…
Warum braucht ein PKW den Allradantrieb? Heutzutage klingt diese Frage schon rhetorisch. Natürlich für eine bessere Umsetzung der Traktionskräfte des Motors. Damit die Räder während der Beschleunigung auf einer rutschigen Straße nicht im Leerlauf stecken bleiben. Vier Antriebsräder sind besser als zwei! Aber die Menschheit hat es nicht sofort geschafft, diese einfache Wahrheit zu verstehen. Fragen Sie jeden Autoexperten und er/sie wird sagen, dass der Beginn der Ära des Allradantriebs bei Serienautos auf das Jahr 1980 fällt und mit dem Aufkommen des Audi Quattro verbunden ist. Er wird sich an seine seltenen Vorfahren wie den Jensen FF von 1966 und den Subaru Leone 4WD von 1972 erinnern. Ein echter Autoexperte wird jedoch klarstellen, dass die ersten Subaru mit Allradantrieb keinen permanenten Allradantrieb hatten. Es war steckbar. Und wie Einwohner von Odessa sprechen, sind es zwei große Unterschiede.
Zwischenlösung
Der abschaltbare Antrieb auf einem der Radpaare ist eine vorübergehende Lösung für PKW. Dieses Konzept kam zu uns aus der Welt der SUVs und Lastwagen mit hoher Durchgängigkeit. Ein solches Auto, bei dem eine der Achsen ständig im Antriebszustand ist und die andere bei Bedarf fest angeschlossen ist, kann alle seine Allrad-Eigenschaften nur in Offroad-Bedingungen zeigen. Aber um auf harten Straßen zu fahren, muss der harte Allradantrieb abgeschaltet werden. Warum? Grund für alles ist die sogenannte Leistungsumwälzung. Denn beim Drehen der Vorderräder gehen einen großen Weg, bewegen sich entlang der Bögen eines größeren Radius, was bedeutet, dass sie schneller als die hinteren drehen. Dabei wird mit der Veränderung der Steilheit der Wende der Unterschied immer größer. Bei Fahrzeugen mit dieser Art von Antrieb nimmt die Traktion an den Vorderrädern ab und an den Hinterrädern nimmt die Traktion zu. Manchmal kann anstelle des Zugmoments eine Bremse auftreten, was bedeutet, dass die Vorderräder den Bewegungswiderstand des Autos erhöhen. Es ist in Ordnung, wenn unter den Rädern Schmutz oder Schnee ist. Dies beeinflusst die Handhabung, so dass das Auto nach außen gehen “Pflug” mit gedrehten Rädern.
Der gesperrte Allradantrieb wurde jedoch bei PKW verwendet. Aber es ist notwendig zu klären, dass es eher Autos mit hohem Durchgang waren. In der UdSSR, zum Beispiel, im Jahr 1938 begannen kleine Chargen von GAS-61 — Allrad-Autos mit einem Sechszylinder-Motor und einer angeschlossenen Vorderachse zu produzieren. Subaru Leone 72. Jahr, übrigens, auch für die Offroad-Fahrt erstellt — die Bodenfreiheit von Autos mit Allradantrieb war höher als die traditionellen Subaru Autos mit dem Vorderradantrieb.
Der Subaru Leone 4WD Station Wagon (1972-1979) ist eine Allradversion des Frontantriebs mit manuell angeschlossenem Hinterradantrieb. Die Motorkapazität beträgt 1.4 Liter (72 PS) oder 1.6 Liter (80 PS). Neben dem Kombi mit Allradantrieb wurden auch eine Limousine und ein Pickup ausgestattet. Bis 1989 wurde der Hinterradantrieb aller Subaru-Allradantrieb entweder manuell (bei Maschinen mit manuellem Getriebe) oder automatisch über eine Mehrscheibenfraktionskupplung (bei Maschinen mit automatischem Getriebe) angeschlossen.
Permanenter Allradantrieb
Was ist das Achsdifferenzial? Dank der Vorder- und Hinterraddifferenziale dreht sich jedes Radpaar in einer Kurve mit unterschiedlichen Geschwindigkeiten. Und das Achsdifferenzial erledigt die gleiche Arbeit für beide Antriebsbrücken. Deshalb kann ein Auto mit drei Differentialen ruhig mit Allradantrieb auf allen Straßen fahren!
Elementar, nicht wahr? Dabei gab es bis Anfang der 80er Jahre die Meinung, dass ein konstanter Allradantrieb für Straßenfahrzeuge nicht notwendig sei. Es wurde angenommen, dass der Motor auf trockenem Asphalt ständig das zweite Paar Räder und Getriebeteile zu nichts drehen. All dies provoziert nur Lärm und erhöht den Kraftstoffverbrauch… Und erst nach dem Erscheinen des Audi Quattro Meinung der Öffentlichkeit langsam begann sich in Richtung eines permanenten Allradantrieb zu ändern. Immerhin wird der Schub des Motors ständig nicht auf zwei, sondern auf vier Räder verteilt. Dabei bleibt ein großer Spielraum für die Seitenkräfte. Ein solches Auto verhält sich stabiler in einer Kurve beim Beschleunigen oder Bremsen des Motors.
Übrigens, Range Rover (1970) und “Niva” (1976) gilt als die ersten massiven Autos mit Achsdifferentialen im Antriebsstrang. Da diese beiden Fahrzeuge aber noch Mitglieder des Offroad-Stammes sind, gehört der Audi Quattro zu den Vorreitern unter den Personenwagen.
Und was ist mit den Konstrukteuren der Rennwagen? Haben sie vorher keinen permanenten Allradantrieb eingesetzt? Es ist bekannt, dass Versuche, Allrad-Rennwagen zu machen, lange vor dem Beginn der Quattro-Ära unternommen wurden. Zum Beispiel war Ferdinand Porsches erstes Nachkriegsprojekt ein Allrad-Rennwagen Cisitalia 360 Mittelmotor-Layout mit 12-Zylinder 1.5-Liter-Motor. Aber es ist zuverlässig bekannt, dass der Antrieb auf den Vorderrädern dieses Wunder der Technik war abschaltbar — der Pilot des Autos benutzte es nur auf geraden Abschnitten der Straße, und vor dem Abbiegen wechselte auf den hinteren Antrieb.
Und hatte Cisitalia Vorgänger? Wie sich herausstellte, baute Ferdinand Porsche bereits 1900 ein Elektroauto mit vier Antriebsmotorrädern. Aber ein echter Schock für Autoexperten war ein Rennwagen der niederländischen Firma Spyker. In jenen “dunklen” Zeiten, als selbst die Bremsen nur auf den Hinterrädern waren, hatte dieses Auto die meisten, dass es einen echten Allradantrieb mit einem Achsdifferenzial gibt!
Spyker, ein niederländisches Unternehmen zur Herstellung von Pferdekutschen, wurde 1880 von den Spiker Brüdern gegründet (der flämische Name wird als Spijker geschrieben). Im Jahr 1900 veröffentlichten sie ihr erstes Auto, und zwei Jahre später mit Unterstützung des belgischen Designers Joseph Lavieretta entwickelten Allrad-Rennspyker 4WD (1902-1907) mit drei Differentialen, die zu dieser Zeit sehr progressiv war. Es gab auch drei Bremsmechanismen — zwei wirkten auf die Hinterräder, und eine weitere Bremse wurde auf der Antriebswelle der Vorderräder installiert.
Wir können also mit Sicherheit sagen, dass die komplette 4WD-Schaltung seit mehr als hundert Jahren… nicht so viele Allrad “Spiker” produziert wurde, weil sie teuer waren und aus verschiedenen Gründen nicht in den Rennen erfolgreich sein konnten. Andere Allrad-Rennwagen wie der Bugatti Tipo 53 und der Miller FWD der frühen 30er Jahre waren ebenfalls nicht viel erfolgreicher. Was Bugatti angeht, gehörte die Initiative dem Fiat-Ingenieur Antonio Pichetto, der 1930 Ettore Bugatti vorschlug, einen Rennwagen mit einer 4×4-Radkonfiguration zu bauen. Und im Jahr 1932 sah das Licht drei Allradantrieb Bugatti Tipo 53 — mit leistungsstarken 300-PS-Motoren mit Lufteinspritzung, Allradantrieb und drei Differentiale.

Das Getriebe mit drei Differentialen verteilte die Traktion des 300 PS starken Achtzylinder-Lufteinspritzers auf alle vier Räder. Das Getriebe, wie bei Bugatti üblich, wurde getrennt vom Motor montiert, das Verteilergetriebe mit dem Achsdifferenzial bildete damit ein Ganzes. Die Antriebswellen für die Vorder- und Hinterachse befanden sich auf der linken Fahrzeugseite, während der Fahrer auf der rechten Seite saß. Trotz der Empfehlungen des damaligen Designers Albert Gregoire wurden im Bugatti T53-Vorderradantrieb keine Scharniere mit gleicher Winkelgeschwindigkeit vom Typ Tracta verwendet, sondern konventionelle Kardane. Außerdem musste die für Bugatti uncharakteristische unabhängige Vorderradaufhängung an der Querfeder verwendet werden. All dies führte zu erhöhten Belastungen auf dem Lenkrad — das Auto in Kurven zu steuern war extrem schwierig, obwohl die Geschwindigkeit der Passage von Kies Kurven war höher als die der hinteren Fahrzeuge der Zeit. Insgesamt wurden drei Bugatti T53 konstruiert, die bis 1935 in verschiedenen Rennen antraten.
Interessanterweise haben die Italiener den Frontantrieb des amerikanischen Rennwagens Miller, der speziell für die Demontage gekauft wurde, sorgfältig untersucht, bevor sie einen Bugatti-Allradantrieb entwickelten.
Der Amerikaner Harry Miller wiederum interessierte sich für die Idee von Bugatti und beschloss auch, eine Allrad-Version seines Autos zu schaffen, die Unterstützung von Sponsor FWD (aus dem Englischen. “four-wheel drive” — Allradantrieb), die sich mit der Produktion von Lastwagen mit einer Radkonfiguration 4×4 beschäftigt. So entstanden die Allrad-Rennwagen von Miller FWD.
Der amerikanische Designer Harry Miller wurde in den 20er Jahren für seine 500-Meilen-Rennwagen auf der Indianapolis Rennstrecke berühmt, und seine geraden Achtzylinder-Motoren mit den beiden oberen Nockenwellen waren die Grundlage der Ettore Bugatti-Motoren.
Interessanterweise kamen Millers Autos mit Front- und Heckantrieb aus der Hand, und im Jahr 1932 schuf er mehrere Miller FWD Allrad-Chassis mit drei Differentialen im Antriebsstrang. Einer von Millers Allradantrieb führte das Indy 500-Rennen von 1934 an, wurde aber aufgrund technischer Probleme Neunter.
Mit diesen Autos ist eine kuriose Episode verbunden: beim Rennen auf der Avus-Strecke in Berlin 1935 war der Allradantrieb von Miller der dritte, als sein Achtzylinder-Motor nicht standhielt und buchstäblich explodierte. Zur gleichen Zeit flogen die Stücke des Motors fast auf die Tribünen, auf denen unter anderen wichtigen Leuten der Nationalsozialistischen Partei Adolf Hitler selbst saß! Das ist, wenn man wirklich bedauert, dass niemand verletzt wurde. Wenn der Kolbensplitter dem letzten den Kopf getroffen hätte, wäre der Lauf der Weltgeschichte ganz anders gewesen…
Aber Bugatti T53 und Miller FWD wurden nicht geschätzt-gepumpt “roh” Design und häufige Pannen. Aber die nächste Episode in der Geschichte der PKW mit Allradantrieb erwies sich als wirklich schicksalhaft.
Ferguson-Formel
Lassen Sie uns zu der Theorie zurückkehren, um den Wert dessen zu schätzen, was in England um die Wende der 50er und 60er Jahre geschah. Das Achsdifferenzial ist so konzipiert, dass beide Antriebsachsen “entkoppelt” werden. Zum Beispiel werden die Hinterräder wahnsinnig abgeschleppt und die Vorderräder stehen still. Und das Differential verhindert das in keiner Weise!
Das Heilmittel für diese Krankheit wurde zuerst von SUV-Designern erfunden. Sein Name ist eine positive Sperre. Der Fahrer zieht im richtigen Moment am Hebel, der Mechanismus fixiert die Gänge des Differenzials — und das Getriebe aus dem Differential, “frei”, verwandelt sich in einen fest geschlossenen. Nach diesem Schema wurden die ersten Generationen von Range Rover, “Feldern” und vielen anderen SUVs produziert. Und übrigens auch der erste Audi Quattro — bis 1984 musste der Fahrer in diesen Fahrzeugen selbstständig die Achsdifferenzialsperre einschalten.
Auch diese Lösung ist palliativ: Die Sperrung auf der Straße des Autos kann nur im Gelände aktiviert werden. Auf dem Asphalt muss sie abgeschaltet werden. Und wenn das Auto plötzlich auf einem rutschigen Abschnitt der Straße fällt, werden die Räder einer Achse anfangen, früher als andere zu gleiten, wenn sie Traktion anwenden.
Ist es möglich, dass das Differential während des Schlupfes automatisch gesperrt wird? Die Anwendung des selbstsichernden Mittelachsdifferenzials ist mit dem Namen des Engländers Tony Rollt, Rennfahrer und Konstrukteurs, verbunden. Er und sein Freund Fred Dixon, auch ein Rennfahrer und ein wahrer Liebhaber, um in der Automobil-Rädchen zu graben, noch vor dem Krieg eröffnet ihr eigenes Entwicklungsbüro Rolt/Dixon Developments für die Vorbereitung der Rennwagen. Nach dem Krieg faszinierten die beiden Freunde die Idee eines permanenten Allradantriebs. Nach der Veröffentlichung eines experimentellen Allrad-“Trolley” Namens Crab, im Jahr 1950, rollte und Dixon unter die Fittiche von Harry Ferguson, einem erfolgreichen Traktor-Tycoon. So entstand die Firma Harry Ferguson Research.
Ferguson träumte nicht von Rennwagen, sondern träumte von einem sicheren Straßenauto, dessen Räder beim Beschleunigen nicht rutschen und beim Bremsen nicht blockiert würden. Rolt und Dixon beschlossen, ein solches Auto von Grund auf neu zu entwerfen — komplett, einschließlich Karosserie, Antriebsstrang und Antriebsstrang!
Freunde fehlten das Wissen, und Claude Hill wurde zu einem kompetenten Chefdesigner eingeladen, der seinen Posten bei Aston Martin für solch eine interessante Arbeit verließ. Aber trotz der finanziellen Möglichkeiten von Ferguson, ging die Arbeit langsam — die experimentelle Limousine Ferguson R4 war nur sechs Jahre später fertig. Aber was für ein! Allradantrieb, mit einem entgegengesetzten Vierzylinder-Motor, Scheibenbremsen auf allen Rädern und elektromechanische Antiblockier-Bremssystem Dunlop MaxaRet, die aus der Luftfahrt entlehnt!
Der Ferguson R4 (1956) war ein experimentelles Auto mit einem Antriebsstrang nach Ferguson-Formel. Der Prototyp hatte einen Drehmomentwandler anstelle eines Getriebes.

Aber das Interessanteste ist, was sich im Handzettel des Prototyps befindet. Wenn Sie es zerlegen, können Sie einen zusätzlichen “Satz” von Zahnrädern, zwei Kupplungen des Überholvorgangs und zwei Pakete von Reibkupplungen zusätzlich zum Differential sehen. Während die Räder nicht rutschen, arbeitete diese ganze Brüder langsam im Leerlauf. Aber als die Räder einer der Achsen begannen zu schleppen und der Unterschied in den Drehzahlen der Abtriebswellen einen bestimmten Wert erreicht, arbeitete eine der Kupplungen, drückte “seine” Paket von Reibkupplungen — und sie bremsten das Differential, sofort sperren und drehen Sie den Differentialantrieb in eine harte!
Der nächste Prototyp, Ferguson R5 Baujahr 1962, die Vorbereitung, die wieder sechs Jahre dauerte, war noch interessanter — es war ein Allrad-Kombi. Experten der Zeitschrift Autocar, die später den Ferguson R5 testeten, teilten ihre Eindrücke mit: “Das Auto erreicht die Schlupfgrenze bei unglaublich hohen Geschwindigkeiten!”
Das Modell Ferguson R5 war bereit für die Serienproduktion im Jahr 1962.
Aber keiner der Autohersteller hat die Produktion des ersten Allrad — Kombi der Welt mit einem selbstsichernden Differenzial und ABS übernommen — die Ferguson-Serie wäre zu kompliziert und teuer. Im Jahr 1962 jedoch gelang es Rolta immer noch, die Führung von Jensen zu interessieren — er schlug vor, den Allradantrieb für das Coupé Jensen CV8 mit 300-PS-Motor Chrysler V8, die dann für die Serienproduktion vorbereitet anzupassen. Allradantrieb war sehr nützlich, leistungsstarke und schnelle Coupé!
Drei Jahre später wurde der experimentelle Allradantrieb Jensen CV8 FF gebaut. Und in 1966 erschien das nächste Modell — Jensen Interceptor. mit einem noch stärkeren 325-PS-Achtzylinder. Neben dem heckgetriebenen Coupé wurde auch eine Variante mit dem bescheidenen JFF-Schild angeboten. Es war der berühmte Jensen FF — das erste Allrad-Serienfahrzeug der Welt mit selbstsicherndem Achsdifferenzial und ABS! Die Buchstaben FF (Formula Ferguson) bezeichnen einen Antriebsstrang, der von Rollt und seinen Kollegen patentiert wurde.

Alle Automobil-Kolumnisten der Zeit bemerkten die herausragende Stabilität des Allradantriebs Jensens und “eine nahezu unbegrenzte Traktion auf nassem Asphalt”. Es ist schade, dass Ferguson selbst nicht überlebt hat — er starb 1960…
Warum reden wir so viel über Fergusons Formel? Weil es das Unternehmen ist Harry Ferguson Research zum ersten Mal in der Welt hat so viel Aufmerksamkeit auf Allradantrieb als Mittel zur Erhöhung der aktiven Sicherheit bezahlt!
Wir haben bereits gesagt, dass der Allradantrieb eine größere Kupplungsreserve hinterlässt, um die Seitenkräfte abzuwehren. Und das ist ein Vorteil. Aber es gibt auch einen Nachteil — die Eindeutigkeit der Reaktionen auf die Kraftstoffzufuhr wird verloren. Wenn Sie in einer rutschigen Kurve auf das Gas eines leistungsstarken Hinterradfahrzeugs drücken, wird das Ergebnis eine Hinterachse rutschen. Bei einem Frontantrieb hingegen rutschen die Vorderräder, wenn die Traktion angewendet wird. Gut oder schlecht, spielt keine Rolle. Die Hauptsache ist, dass der Fahrer immer weiß, wie sich das Auto in diesem Fall verhalten wird.
Welche Achse wird auf einem Allradfahrzeug gleiten? Die Antwort ist nicht einfach. Wenn jetzt der vordere Teil des Körpers mehr entladen oder unter den Vorderrädern rutschigere Oberfläche, warten Sie auf Schleudern. Und wenn die Hinterräder schlechtere Kupplungsbedingungen haben, wird das Auto ins Schleudern geraten. Die Reaktion kann mehrdeutig sein! Und es ist nicht sicher.
Jensen FF (1966-1971) ist eine Allradversion des Jensen Interceptor Coupés. Der erste serienmäßige Allradantrieb mit selbstsicherndem Achsdifferenzial. Der Chrysler V8-Motor mit 6.3 Litern Hubraum entwickelte eine Leistung von 325 PS und brachte alle Räder über ein dreistufiges TorqueFlite-Automatikgetriebe oder ein 4-Gang-Schaltgetriebe an. Auf diagonalen Reifen Größe 6.70–15 (wie die “Wolga GAZ-21”) Jensen FF mit Leergewicht 1,800 kg entwickelt Geschwindigkeit in 212 km/h und beschleunigt auf Hunderte in 7.7 Sekunden. Weitere technische Merkmale: Zahnstangenlenkung mit Servolenkung, Scheibenbremsen aller Räder, Einkanal-ABS Dunlop MaxaRet (maximale Bremsleistung), Einzelradaufhängung vorne an den Doppelquerlenkern und abhängige Feder mit Panhard-Traktion hinten. Im Jahr 1968 kostete der Jensen FF in Großbritannien 6,000 Pfund. Etwa zu diesem Preis konnte man den günstigsten Rolls-Royce kaufen. Insgesamt wurden 318 Allradfahrzeuge produziert.
Zum Glück war Tony Roll selbst ein Rennfahrer und sehr gut — einmal, Anfang der 50er Jahre, gewann er sogar das 24-Stunden-Rennen von Le Mans. Daher haben Rolt und seine Kollegen von Anfang an versucht, die Mehrdeutigkeit des Allradantriebs durch die Verwendung eines ungleichmäßigen Zwischenachsendifferenzials zu vermeiden. Die Hinterräder aller Fahrzeuge mit Ferguson-Getriebe erhielten 63% des Drehmoments und die vorderen 37%. So war die Reaktion auf die Erhöhung der Traktion nahe am Hinterradantrieb.
Das selbstsichernde Differential ermöglichte Jensen, das Beste aus beiden Antriebsstrangtypen zu holen. Einfacher Einstieg in die Drehung und keine Kraftzirkulation in normalen Fahrmodi ohne Schlupf — vom Differentialantrieb. Aber die beste Implementierung des Motorschubs beim Gleiten ist von einem festen.
Die Notwendigkeit für einen Mechanismus, der flexibler und reibungsloser den Grad der Blockierung des Achsdifferenzials ändern würde. Und in den späten 60er Jahren Tony Roll zusammen mit Derek Gardner, der später übernahm den Posten des Chefdesigner der Rennwagen Tyrrell, nahm seltsame, auf den ersten Blick, Experimente mit einer Silikonflüssigkeit, die in den Antriebskupplungen von Ventilatoren Heizkörper verwendet wurde. Ja, es waren Rolt und Gardner, die als Erfinder der Visco-Kupplung in die Geschichte eingingen!
Geschichte der Entwicklung von selbsthemmenden Differentialen
Zylinder mit Paketen die Kupplungen im inneren, gefüllt mit Flüssigkeit Silikon, am besten geeignet für die Rolts Ziel, — Gänge Bremsen zentraldifferential während der Schlupf. Obwohl die Drehzahlen aller Räder ungefähr gleich sind, beeinflusst der Visco-Kupplung in keiner Weise die Arbeit des Achsdifferenzials. Doch nun wurden die Räder einer der Achsen abgeschleppt. Gang zentraldifferential sofort beginnen sich zu drehen, die sich mit ihm Pakete der Visco-Kupplung “sprudeln” die Silikonflüssigkeit, und die Kupplung “eingeklemmt” ist, teilweise oder voll sperrender Visco-Kupplung Differenzial.
Dank dieser Vorrichtung wurde die Differentialsperre glatter und weicher durchgeführt, was sich positiv auf die Handhabung auswirkte. Nach den Patenten für die Visco-Kupplungen im Jahr 1971 gründete Tony Roll die Firma FF Developments — speziell für die Ausstattung von Fahrzeugen mit Allradantrieben der eigenen Konstruktion. Zu den ersten Bestellungen des Unternehmens gehörten beispielsweise Allradversionen von Bedford-Vans für die britischen Forstbehörden, Ford Zephyr FF-Autos für die Polizei oder Opel Senator 4×4-Limousinen für die britische Militärmission in Berlin. Aber der Antriebsstrang für das amerikanische Auto AMC Eagle, das von 1979 bis 1988 produziert wurde, war die wichtigste Errungenschaft des FFD. Es war ein gewöhnlicher PKW AMC Concord, aber mit einer 75-mm-Karosserie und vergrößerten “Off-Road” Reifen. Und natürlich mit Allradantrieb. Darüber hinaus Serienfahrzeug zum ersten mal in der Welt wurde mit Mittendifferenzial, der mit den Einbaukupplungen blockiert!
Natürlich wurde der AMC Eagle hauptsächlich für diejenigen entwickelt, die regelmäßig Offroad stürmen — Allradantrieb erschien auf diesen Autos nicht aus dem Wunsch, eine solide Beschleunigung oder bessere Stabilität und Handling zu erreichen, wie im Fall des Supersportwagens Jensen FF oder Audi Quattro. Aber in Sachen Antriebsstrang sind Autos wie der Subaru Impreza Turbo oder der Mitsubishi Lancer Evo von der ersten bis zur sechsten Generation zu direkten Erben des AMC Eagle geworden. Ihre Achsdifferentiale werden ebenfalls durch integrierte Viscomuftsblöcke blockiert.

Zähflüssige Kupplung Verteilergetriebe AMC Eagle ist ein zylindrischer Körper mit friktionellen Scheiben, gefüllt mit viskosen Silikonflüssigkeit (siloxan), eingebauten Visco-Kupplung Differenzial. Wenn die Räder einer Achse gleiten, die führende und angetriebene Pakete von Laufwerke in Visco-Kupplung rotieren relativ zueinander, der Druck und die Temperatur im inneren erhöht, die Viskosität des Siloxans geändert und zähflüssige Kupplung Bremsen ein Wochenende aus Zahnrädern, verhindert die Drehung relativ zu dem Gehäuse und sperrender Visco-Kupplung Differenzial.
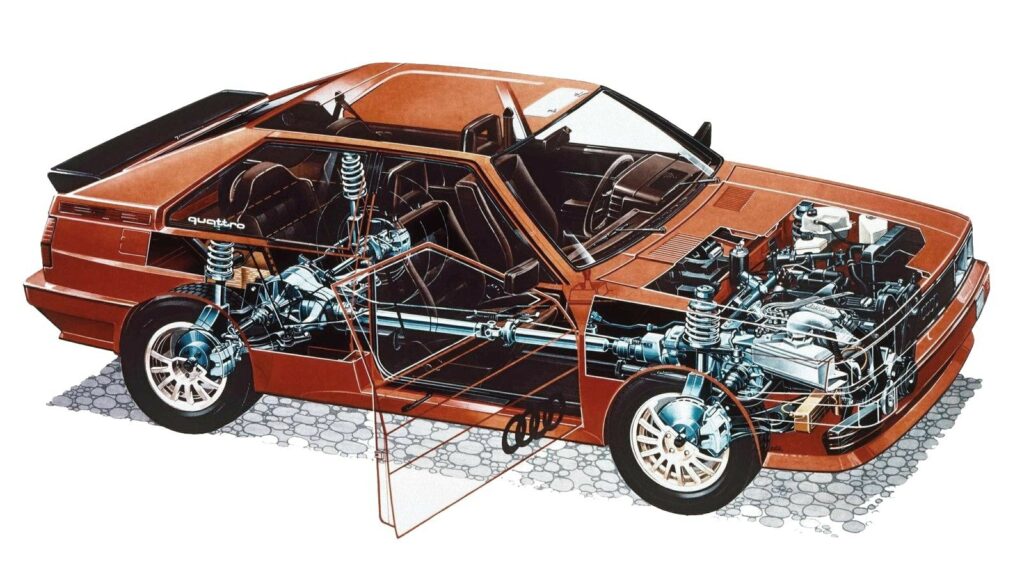
Das serienmäßige Audi Quattro Coupé, das 1981, zwei Jahre nach dem Debüt des AMC Eagle, erschien, wurde bereits mit einem herkömmlichen offenen Achsendifferenzial mit einer Zwangsverriegelung ausgestattet. Ferdinand Piech, der Anfang der 80er-Jahre die Ingenieurabteilung von Audi leitete, entschied sich für den Quattro für ein sehr elegantes Design, das perfekt zum Layout der Ingolstädter Fahrzeuge passte. Der längs angeordnete Antriebsstrang des Vorderradfahrzeugs zeigte die Stirnseite des Getriebes auf die Hinterräder — es blieb nur übrig, das Achsdifferenzial in das Getriebe zu integrieren. Aber Piechs Designer haben das für Allradfahrzeuge traditionelle Schema mit einem separaten Verteilergetriebe für den Frontantrieb nicht gebaut. Die Deutschen machten die Sekundärwelle der Box hohl- und durch sie wurde die Antriebswelle der Vorderräder übersprungen. Wahrlich, das Genie liegt in der Einfachheit…
Von Anfang an entschieden sich die Ingenieure für Audi, im Gegensatz zum FFD, eine symmetrische Drehmomentverteilung über die Achsen — 50:50. Und im Jahr 1984 veraltete Griffe positive Sperre “Center” schließlich verschwunden aus den Kabinen Allradantrieb Audi, und die vertraute alle selbstsichernden Differential Torsen erschien in Quattro-Getriebe. Der Name Torsen kommt von den Worten “Drehmomentsensor” und spiegelt die Fähigkeit dieses rein mechanischen Geräts wider, seinen Sperrgrad als Reaktion auf eine Änderung des Drehmoments an den Abtriebswellen sofort und reibungslos zu erhöhen. Torsen braucht daher keine Visco-Kupplungen, da er selbst gesperrt ist. Darüber hinaus funktioniert es nicht aufgrund von Geschwindigkeitsunterschieden nach dem Schlupf, sondern sogar vor ihm: Torsen ist in der Lage, auf Änderungen der Kupplungsbedingungen im Kontaktbereich des Reifens zu reagieren!
Übrigens, als die Designer der modernen großen SUVs begannen, über das Erreichen der “Personenkraftwagen” Handling zu denken, erinnerten sie sich auch an Thorsen — er wird in den Getrieben von Autos wie Range Rover, VW Touareg/Porsche Cayenne und Toyota Land Cruiser Prado verwendet.
Aber gehen wir zurück in die 80er Jahre. Der triumphale Auftritt des Audi Quattro in der Rallye-Szene war der Beginn eines Allradbooms. Alle Rallye-Teams der Gruppe B eilten, um die 4×4-Versionen zu erstellen. Einer nach dem anderen erschienen Peugeot 205 T16, Metro 6R4, Lancia Delta S4, Ford RS200. Alles wie eins-mit Visco-Kupplungen in selbsthemmenden Differentialen, die von FFD entwickelt wurden. Stuart Rollt, der Sohn von Tony, war für die Arbeit mit Rallye-Teams bei FFD verantwortlich…
Anfang der 90er Jahre wandte sich das AZLK-Werk auch an FFD, als beschlossen wurde, eine Rallye-Allrad-Modifikation des Moskauer-2141 zu entwickeln. Dank der Briten wurde ein Antriebsstrang mit drei selbstsichernden Differentialen, vorne, hinten und Mittelachse (genau wie bei den Rennwagen Ford RS200) geschaffen. Das Handling der experimentellen Allradantrieb Moskowiter in extremen Modi verdient die schmeichelhaftesten Bewertungen — das Verhalten der Rennwagen war vorhersehbar. Es stellte sich heraus, dass Sie die Lenkbarkeit des Autos in einem weiten Bereich einstellen können, indem Sie die “Steifigkeit” der blockierenden Visco-Kupplungen in allen drei Differentialen auswählen. Zum Beispiel erhöht eine “strengere” Sperrung des Hinterraddifferenzials die Neigung des Autos, die Hinterachse zu schleudern. Eine Erhöhung des Sperrkoeffizienten des vorderen oder Mittelachsdifferenzials erhöht dagegen die Stabilität — das Auto fährt aufgrund des Schlupfes und der unzureichenden Manövrierbarkeit der Vorderräder schwer in die Kurve.
Diese Anpassung gilt jedoch nur in einem Fall — bei einem Rallye-Fahrstil mit Rutschen. Die drei selbstsichernden Differentiale sind daher das Vorrecht der Rallye-Autos der WRC-Gruppe. Und in der Regel sind die Differentiale dieser Fahrzeuge in Visco-Kupplungen und Pakete von Mehrscheibenkupplungen mit hydraulischem Antrieb und elektronischer Steuerung nicht eingebaut. Auf diese Weise erhalten Designer die umfassendsten Möglichkeiten, die Verwaltbarkeit in Echtzeit anzupassen. Zum Beispiel kann der Bordcomputer die Kupplungen in allen drei Differentialen beim Eintritt in die Kurve “lösen” und sie für einen leichteren Eintritt in die Kurve öffnen. Und wenn der Fahrer beim Verlassen der geraden beschleunigt, gibt die Elektronik den Befehl, und der Servo “klemmt” die Kupplung in den Differentialen so, dass das minimale Schlupf aller Räder und gleichzeitig zu erreichen, nicht die Linie des zulässigen Untersteuerns zu überqueren, hinter dem das Auto in der Kurve gebracht wird.
Übrigens, die erste Lenkkupplung in Daimler-Benz verwendet-im Antriebsstrang Mercedes-Benz E-Klasse 4Matic Baujahr 1986 mit der Karosserie W124. Darüber hinaus gab es drei Kupplungen — bei Bedarf schaltete die Elektronik den Antrieb zunächst an die Vorderräder an und aktivierte dann nacheinander die Verriegelung der Zwischen-und Hinterraddifferenziale. Aber ein solches System erwies sich als unglaublich komplex. Darüber hinaus hat die Elektronik die Vorderräder auf einer instabilen Oberfläche abwechselnd angeschlossen und getrennt…
Porsche war ein weiterer Pionier bei der Verwendung von elektronisch gesteuerten Kupplungen in Hochgeschwindigkeitsautos — der Porsche 959 von 1986 hatte zwei Kupplungen und die Elektronik funktionierte in vier Modi. Später begannen die Japaner, Serienfahrzeuge mit Übertragungen ähnlicher Komplexität zu produzieren — das ist zum Beispiel der Mitsubishi Lancer Evo, der fortschrittlichste Allrad-Straßenwagen aller Zeiten, die jemals von der beliebten russischen Zeitschrift Autoreview getestet wurden. Die Entwicklung mit dem achsgesteuerten AZD (Aktives Zentraldifferenzial) und dem hinteren AYC-Differenzial mit aktiver Drehmomentverteilung ist in der Lage, ein Wunder zu schaffen…

Statt Differential
Während Rallye-Ingenieure konzentrierten sich auf die Mechanismen Safe-Sicherung, Designer von Serien-Autos, im Gegenteil, gingen den Weg der Vereinfachung — Sie gar aufgegeben zentraldifferential, indem er es mit einer Visco-Kupplung. Volkswagen Golf II Syncro 1985 wurde der erste europäische Pkw mit einem solchen Getriebe. Es wurde von Ingenieuren von GKN entwickelt, die FFD bereits 1969 erworben haben. Die Vorteile einer solchen Schaltung waren die Einfachheit und Vereinheitlichung des Allradmodells mit dem Basismodell. Unter normalen Bedingungen das Auto hat die Eigenschaften und Abwicklung mit Vorderrad und beim Schlupf der Vorderräder durch 0.2 Sekunden zurückgesetzt zähflüssige Kupplung, die fähig ist, verteilen Sie bis zu 70% des Drehmoments auf die Hinterräder.
Werfen wir einen Blick auf den VW Golf III Syncro Antriebsstrang. Das Verteilergetriebe ist am Getriebe befestigt und die Visco-Kupplung ist in der Einheit mit dem Hauptgetriebe der Hinterachse installiert und verbindet den Antrieb mit den Hinterrädern, wenn die Vorderräder rutschen. Beim VW Golf IV ersetzt die Haldex-Kupplung die herkömmliche Visco-Kupplung.
Aber diese “vereinfachte” Antrieb der Hinterräder hatte einen signifikanten Nachteil — auch eine kleine Verzögerung in der Arbeit der Visco-Kupplung verschärfte die Mehrdeutigkeit der Reaktionen. Wenn das Gas in einer rutschigen Kurve gegeben wurde, wurde das Auto zuerst nach außen als Vorderrad gefahren, und dann, nach dem Anschluss der Hinterräder, änderte es stark den Stil der Bewegung und konnte leicht ins Schleudern geraten.
Hier machten sich die Japaner — Sie haben wiederholt versucht, diesen Nachteil ausgleichen, indem Sie den Eigenschaften Visco-Kupplungen und verwenden sie sie nicht nur für die Aufnahme des Antriebs an den Hinterrädern, sondern auch für Cross-Achse sperren Differentiale. Bei einigen Modellen (zum Beispiel Nissan Sunny/Pulsar Baujahr 1988) gab es drei Visco-Kupplungen: eine enthielt den Antrieb auf die Hinterräder, und zwei andere dienten dazu, die Zwischenräder Differentiale zu sperren. In Mazda Concerto 4WD Visco-Kupplungen ersetzt nicht nur die Mittelachse, sondern auch das Hinterraddifferenzial…
Aber dann stellte sich heraus, dass es viel bequemer einfach verwenden Friktionskupplung, die Pakete werden komprimiert, Hydraulikmotoren, statt derselben Visco-Kupplung im Antrieb auf die Hinterräder. Und die Elektronik kann die Kompression der Reibkupplungen perfekt steuern und damit das an den Hinterrädern aufgebrachte Drehmoment regulieren.
Heute haben die meisten PKW-Allrad-und SUVs eine lenkbare Kupplung im Antrieb einer der Achsen-sei es der Haldex bei Fahrzeugen mit der VW Golf-Plattform, das VTM-4-System von Honda oder der xDrive bei BMW. Darüber hinaus hat die hohe Geschwindigkeit der modernen Kupplungen die Verzögerung bei der Verbindung der Räder fast unsichtbar gemacht — jetzt hängt alles nur von den Einstellungen der Steuerelektronik ab. Zum Beispiel sind die Getriebe des Golf 4Motion und des Audi A3 Quattro im Aussehen völlig identisch. Aber andere Software ermöglicht es den Designern von Volkswagen, eine symmetrische Verteilung des Drehmoments zwischen den Achsen zu wählen, aber Audi lieber nur 40% der Traktion hinten zu verteilen, was seinen Autos mehr Vorderradcharakter verleiht. Es ist eine Frage der Präferenz…
Und welche Schemata wählen die Fahrer selbst? PKW mit manuell an die zweite Achse angeschlossenem Antrieb werden nun wohl nicht mehr produziert. Und wie für die anderen drei Systeme…
Natürlich sind aus unserer Sicht die interessantesten Autos die Erben der Ferguson-Formel, in deren Getriebe sich ein selbstsicherndes Achsdifferenzial befindet. Und es spielt keine Rolle, welche Art von Sperre durchgeführt wird — mit Visco-Kupplungen, wie Subaru, mechanische Differential Torsen, wie Audi A4-A6-A8 Quattro, VW Phaeton oder Kupplungen mit elektronischer Steuerung (Mitsubishi Lancer Evo). Die Hauptsache ist, dass die automatische Sperrung des “Zentrums” mit der richtigen Einstellung die Handhabung des Autos erheblich verbessern kann — um es für den erfahrenen Fahrer sicherer und angenehmer zu machen.
Der Haupttrend ist jetzt der variable Traktionsvektor, bei dem das Drehmoment proaktiv auf Befehl der Elektronik auf das Rad aufgebracht wird, das es so effizient wie möglich realisieren kann. Im Moment verfügt die Mitsubishi Lancer Evo X Limousine über den anspruchsvollsten Allradantrieb der Welt. Zusätzliche Getriebe sind in der Lage, Drehmoment zwischen den Hinterrädern zu übertragen, die Mitte ist durch eine elektronisch gesteuerte Kupplung blockiert, und vorne gibt es eine herkömmliche mechanische selbstsichernde Vorrichtung. Die Ära des Allradantriebs, wie wir sie alle kennen, wird nach dem Aufkommen eines Elektroautos mit vier Motorrädern enden.
Aber wir werden auch Autos mit unvollständigem Hinterradantrieb nicht unbeaufsichtigt lassen. Ihre Zahl wächst allmählich. Die Haldex-Kupplung wird in letzter Zeit von Volvo und Saab aktiv genutzt. Auch Getriebe mit offenen Achsdifferenzialen finden ihre Anwendung. Die Mehrscheibenkupplung Haldex wird bei der geringsten Abweichung der Drehzahlen der Welle ausgelöst. Die Drehung eines der Endnocken führt dazu, dass die Rollen auf den Arbeitsflächen rollen und sich vorwärts und rückwärts bewegen, indem sie die Kolben in die Ringzylinder der Pumpe schieben. Die Kolben pumpen das Öl mit Hilfe eines Kolbens in den angetriebenen Zylinder, der das Paket der Scheiben komprimiert. Die Elektronik kann jedoch durch ein Magnetventil Druck ablassen und so das an die Räder zugeführte Drehmoment flexibel einstellen.

Vor kurzem haben wir jedoch festgestellt, dass die tatsächlichen Fahrleistungen von Fahrzeugen mit unterschiedlichen Allradantrieben immer näher zusammenrücken. Und je besser die elektronischen Anti-Rutsch-Systeme und die Haldex-Kupplungssteuerprogramme werden, desto weniger unterschiedlich ist die Handhabung der mit ihnen ausgestatteten Fahrzeuge. Zweifellos ist dies ein großer Schritt nach vorne.
Dies ist eine Übersetzung. Man kann den ursprünglichen Artikel hier lesen: https://www.drive.ru/technic/4efb336400f11713001e4f54.html

Veröffentlicht November 04, 2021 • 25 m zum Lesen



