
车轮定位对车辆的操控性和道路行为有重大影响。传统上,定位设置是静态和固定的。然而,兰博基尼率先推出了一项名为主动车轮托架 (AWC) 的突破性系统,该系统可在运行过程中动态调整后轮的外倾角和前束角,从而增强驾驶动力。

AWC 系统旨在通过连续调整车轮角度来显著提高机动性。这种动态调整能力意味着固定设置带来的不利影响(例如为提高控制力而过大角度导致的快速轮胎磨损)将大大减轻。
AWC 采用两个独立的机制来调整前束角和外倾角,每个机制都由自己的电动机通过齿轮传动装置驱动。这些调整由复杂的算法控制,由兰博基尼首席工程师 Ruven Mohr 设计,代表了该系统最复杂的方面。此外,AWC 必须与车辆现有的稳定、牵引力控制和主动空气动力学系统无缝集成。
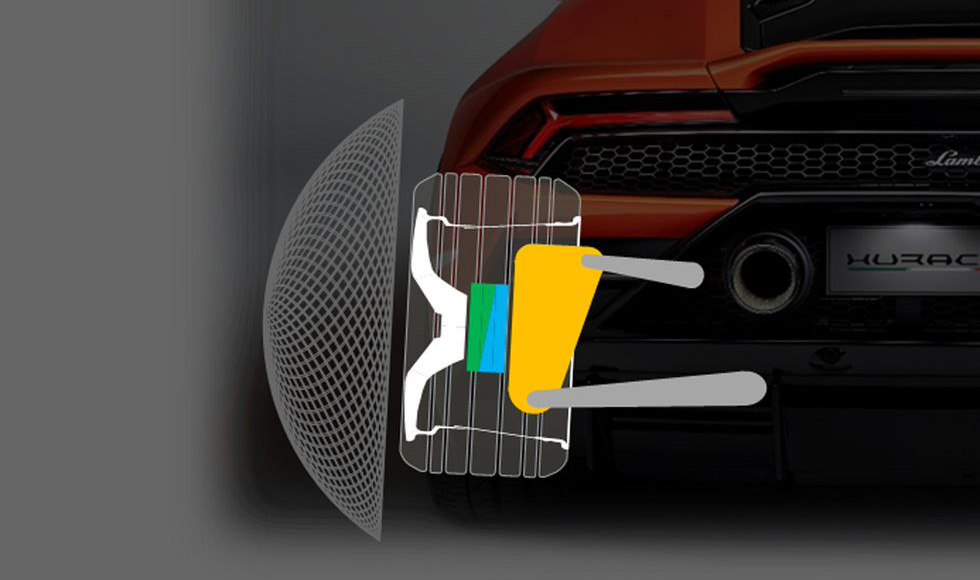
AWC 的 48 伏步进电机能够将外倾角从 +2.5 度调整到 -5.5 度,将前倾角从 6.6 度调整到任意方向,同时调整两个角度的速度最高可达每秒 60 度。这种快速调整过程可将横向加速度提高多达 25%。AWC 的有效性已在赛道上得到证实,在工厂测试驾驶员的指挥下,配备该系统的兰博基尼 Huracan 在纳尔多赛道的单圈时间缩短了 2.8 秒,在伊莫拉赛道的单圈时间缩短了 2.2 秒,在纽伯格林赛道的单圈时间缩短了近 5 秒。

展望未来,兰博基尼计划将 AWC 执行器用于即将推出的插电式混合动力汽车(如 Revuelto)的 400 伏电气系统,以补充前轮上现有的牵引力矢量控制功能。这项创新彰显了兰博基尼致力于将性能提升与尖端技术相结合的承诺,为爱好者和专业人士树立汽车工程领域的新标杆。
照片:蘭博基尼
這是翻譯。您可以在這裡閱讀原文: Ноу-хау Lamborghini: система динамического изменения углов установки колес
出版 六月 27, 2024 • 1m



